



FreeRTOS作为一款轻量级的实时操作系统(RTOS),广泛应用于嵌入式系统中,实时任务是其核心组成部分,负责管理和调度系统资源,确保系统按照预定的时间要求执行,本文将重点探讨在FreeRTOS中创建和管理两个实时任务的方法和策略。
FreeRTOS实时任务概述
在FreeRTOS中,实时任务(Task)是最基本的执行单元,每个任务都是一个无限循环的线程,任务之间独立运行,并由调度器根据优先级进行调度,实时任务的设计对于系统的性能和响应速度至关重要。
创建两个实时任务
在FreeRTOS中创建两个实时任务,首先需要定义任务的控制块(Task Control Block, TCB),包括任务的名称、优先级、栈大小等信息,以下是创建两个实时任务的基本步骤:
1、定义任务控制块:为每个任务分配一个唯一的任务控制块,包括任务的名称、优先级和栈大小等参数。
2、创建任务函数:编写每个任务的执行逻辑,即任务函数,任务函数包含了任务要执行的具体操作。
3、创建任务:使用FreeRTOS提供的API函数,如xTaskCreate()来创建任务,为每个任务分配资源,并将其添加到调度器的任务列表中。

实时任务的设计原则
在设计两个实时任务时,需要遵循一些基本原则以确保系统的稳定性和性能:
1、优先级分配:根据任务的紧急程度和系统需求合理分配任务的优先级,高优先级任务可以打断低优先级任务的执行,确保关键任务的及时响应。
2、栈大小设计:合理设置每个任务的栈大小,以确保任务在执行过程中不会发生栈溢出或栈损坏的问题。
3、任务独立性:设计任务时,应尽量保持任务的独立性,避免任务间的紧密耦合,以便于后期的维护和扩展。
4、任务间通信:当任务间需要交换数据时,使用FreeRTOS提供的任务间通信机制,如消息队列、信号量等,以确保数据的安全传输和系统的实时性。
实时任务的实现细节
在实现两个实时任务时,需要注意以下几个方面的细节:
1、任务初始化:在创建任务后,需要进行必要的初始化操作,如配置任务所需的硬件资源、初始化任务内部的变量等。
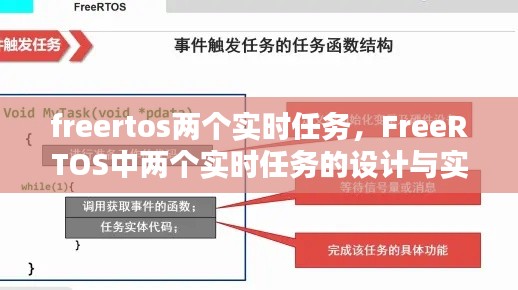
2、任务循环体:实时任务的主体是一个无限循环,循环体内包含任务的执行逻辑,需要根据实际需求编写任务循环体,确保任务的正确执行。
3、任务调度:FreeRTOS的调度器会根据任务的优先级来决定任务的执行顺序,需要合理设置任务的优先级,以确保系统的实时性。
4、任务间协同:当存在多个实时任务时,需要合理设计任务间的协同机制,确保系统的整体性能和稳定性。
案例分析
为了更好地理解FreeRTOS中两个实时任务的设计和实现,可以结合实际项目案例进行分析,通过案例中的具体应用场景、任务设计、实现细节和性能评估等方面,深入探讨实时任务在FreeRTOS中的应用。
本文介绍了FreeRTOS中两个实时任务的设计原则和实现方法,通过合理设计任务的优先级、栈大小、通信机制等,可以确保系统的实时性、稳定性和性能,结合实际项目案例进行分析,可以更好地理解实时任务在FreeRTOS中的应用。
转载请注明来自南京贝贝鲜花礼品网,本文标题:《FreeRTOS中两个实时任务的设计与实现详解》




 蜀ICP备2022005971号-1
蜀ICP备2022005971号-1
还没有评论,来说两句吧...